
A stepper motor is a simple two phase brushless synchronous motor containing a segmented magnetized rotor and a stator consisting of a prescribed number of electromagnetic coils. When energized, these coils create north and south polls that push or pull the segmented magnetized rotor to make it spin.
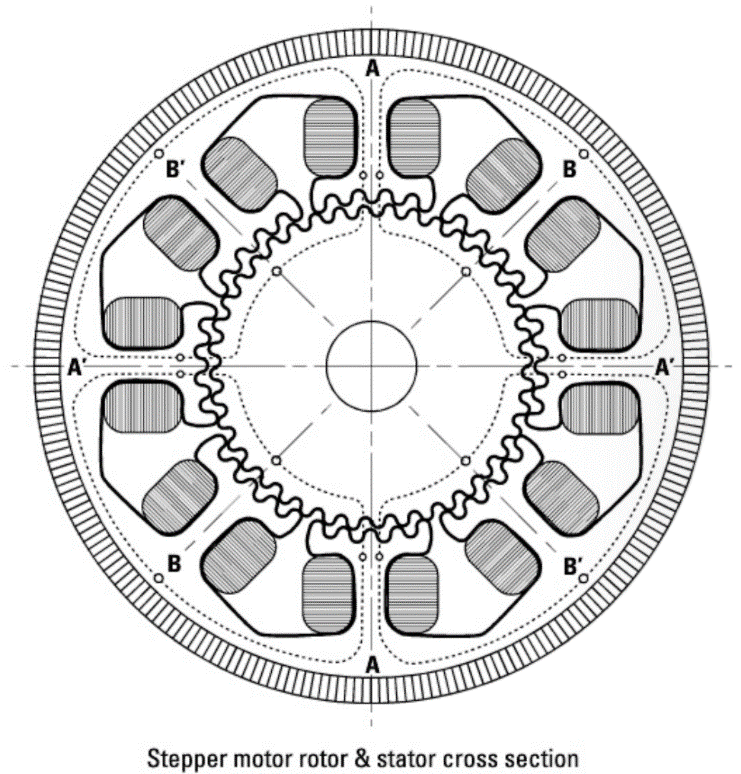
The illustration shows the internal construction and tooth alignment of a typical hybrid stepper motor. The fine teeth, evenly spaced around the entire diameter, provide the incremental angular rotation that results in mechanical motion.
You can buy cnc stepper motor at https://www.automationtechnologiesinc.com/products-page/stepper-motors
Stepper motors consist of two windings (2 phase) energized with DC current. When the current in one winding is reversed, the motor shaft moves one step.
By reversing the current in each winding, the position and speed of the motor is easily and precisely controlled, which makes the step motor extremely useful for many different motion control applications. The step size is determined by the motor design characteristics, with the 1.8° step angle the most common (consisting of 200 teeth). Other step angles are readily available. The number of steps per revolution is calculated by dividing 360° by the step angle.
Stepper motors are selected by holding torque and corresponding rated current. Holding torque specifies the maximum external torque applied to a motor (energized with its rated current) without causing continuous rotation. At the point the motor begins to rotate, the available torque is often referred to as pullout torque. Pullout torque ratings are represented as values plotted on the motor’s speed/torque curves.